研究活動
【重要なお知らせ】令和7年度入学生から専攻名称が変更となります。詳しくはこちら
研究ユニット
制御工学ユニット
ユニットの概要
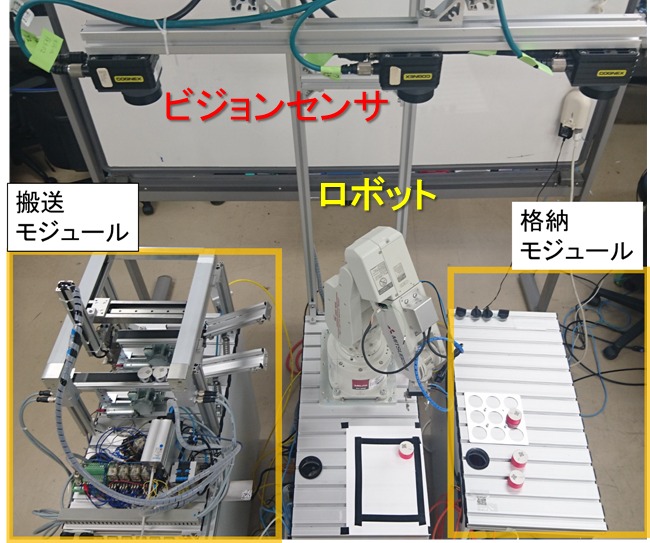
- 自動化システムの制御における理論から実践までを研究しています。とくに、スマートな(賢い)オートメーションに関する制御システムの実現を専門としています。
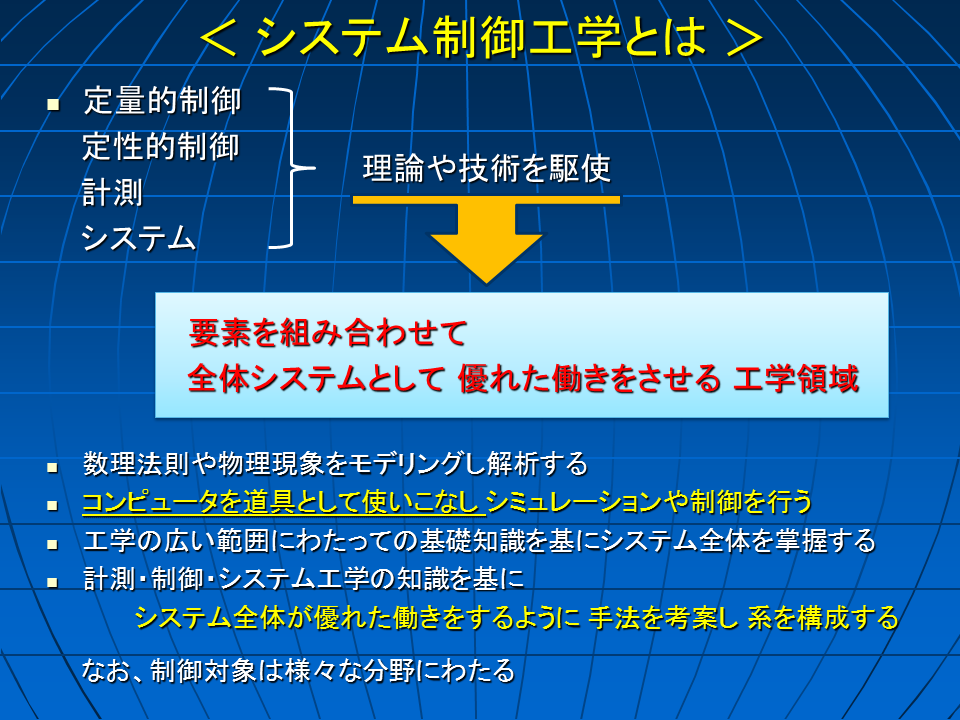
- ファクトリーオートメーションや自律動作システムなどの制御システム構築において、ロボットやセンサの応用、制御アルゴリズム・プログラミング、理論に基づく制御設計、シミュレーション、コンピュータ制御、プログラマブルコントローラ(PLC)への実装などの教育を担当しています。定量的制御、定性的制御、計測、システムに関する理論や技術を駆使して、要素を組み合わせて全体システムとして優れた働きを実現することの理解と実践に結び付けます。
- 制御工学分野において、計測自動制御学会や電気学会等における学会活動、技能五輪等における技能振興活動を行っています。また、第4次産業革命に対応したものづくり人材育成に関する活動にも参画しています。
ユニットの担当分野
- 制御工学,フィードバック制御,シーケンス制御,システム制御,スマート制御
- 自動化システム,スマートファクトリーオートメーション,協働ロボット
- プログラマブルコントローラ,インテリジェントセンサ,制御用コンピュータ
教員
- 教授 佐藤 崇志 基盤ものづくり系
主な研究テーマ
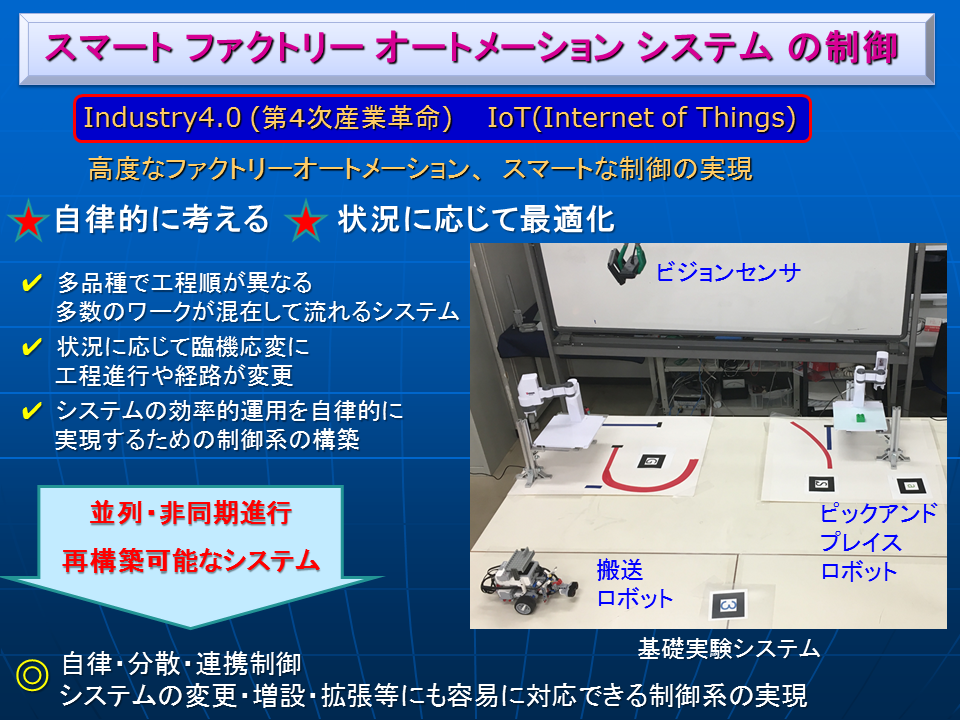
- スマートファクトリーオートメーションシステムの制御
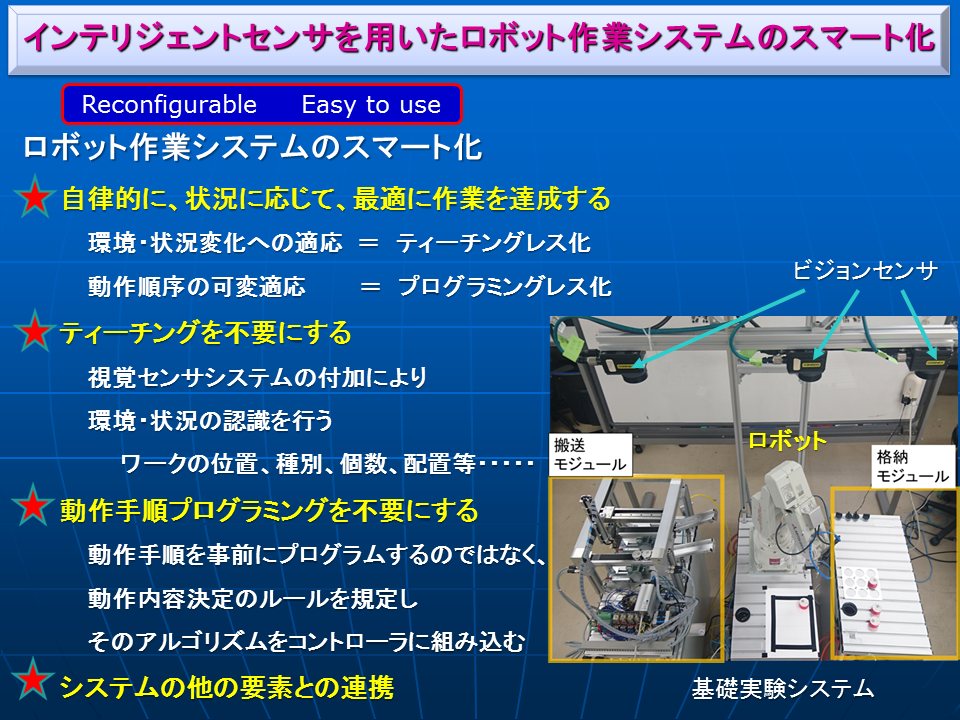
- インテリジェントセンサを用いたロボット作業システムのスマート化
- プログラマブルコントローラの国際標準に基づくPLCプログラムの明確で効率的な作成法
など